Idea:
When I was younger, I used to watch a movie called Ben 10 alien swarms, the main topic was how could a small swarm robots make someone rule the world. We have always wondered about how small things could collaborate together to achieve a one big goal and how powerful is this, one of the examples is Ants. Applying the same concept to different fields could come out with amazing expectations, so we decided to apply this on minesweeper robots! the main challenge is finding the algorithms that could lead every single swarm robot by himself and achieve the main target as whole.
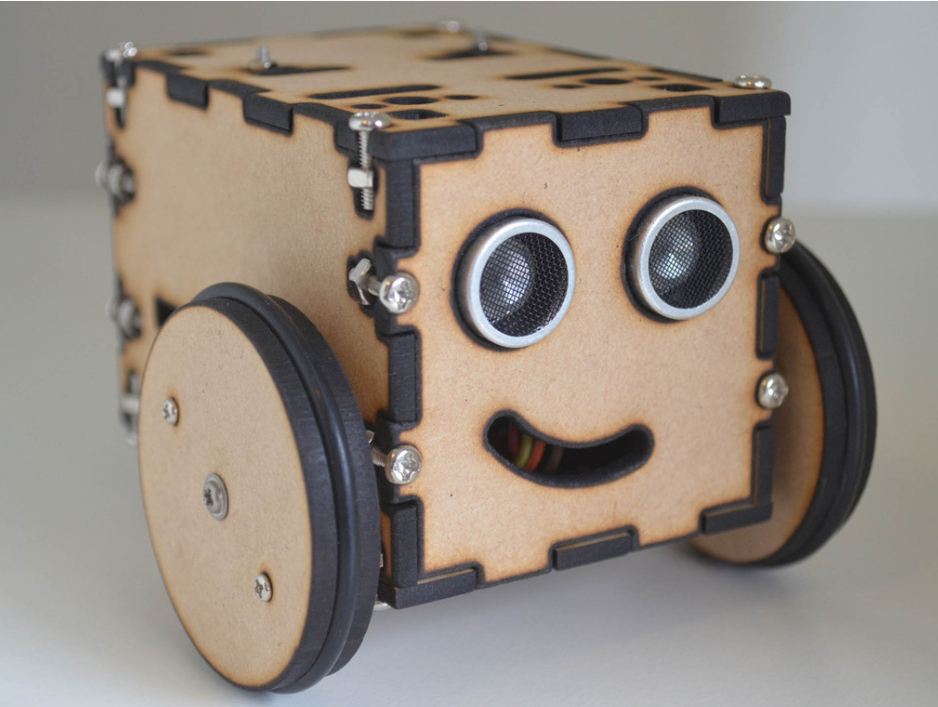
Components:
We have prepared a humble list of components that could make us an impresion on the mechanism of movement of the robot which are:
- SG90(360°) ×2
- TAMIYA Track & Wheel set
- TP4056 Charging Module
- MT3608 Boost Module
- HC-SR04
- 16340Lithium ion Battery(or CR123A)
- Slide Switch
- Universal Board
- M3 Screw & Spacer